3D Object Reconstruction from Hand-Object Interactions
Dimitrios Tzionas and Juergen Gall
Abstract
Recent advances have enabled 3d object reconstruction approaches using a single off-the-shelf RGB-D camera. Although these approaches are successful for a wide range of object classes, they rely on stable and distinctive geometric or texture features. Many objects like mechanical parts, toys, household or decorative articles, however, are texture-less and characterized by minimalistic shapes that are simple and symmetric. Existing in-hand scanning systems and 3d reconstruction techniques fail for such symmetric objects in the absence of highly distinctive features. In this work, we show that extracting 3d hand motion for in-hand scanning effectively facilitates the reconstruction of even featureless and highly symmetric objects and we present an approach that fuses the rich additional information of hands into a 3d reconstruction pipeline, significantly contributing to the state-of-the-art of in-hand scanning.
Images/Video
![]()
The hand tracker used in the in-hand scanning pipeline. The left image shows the raw depth input map, the middle image shows the hand pose overlaid on top of the RGB-D data, while the right image shows just the hand pose.
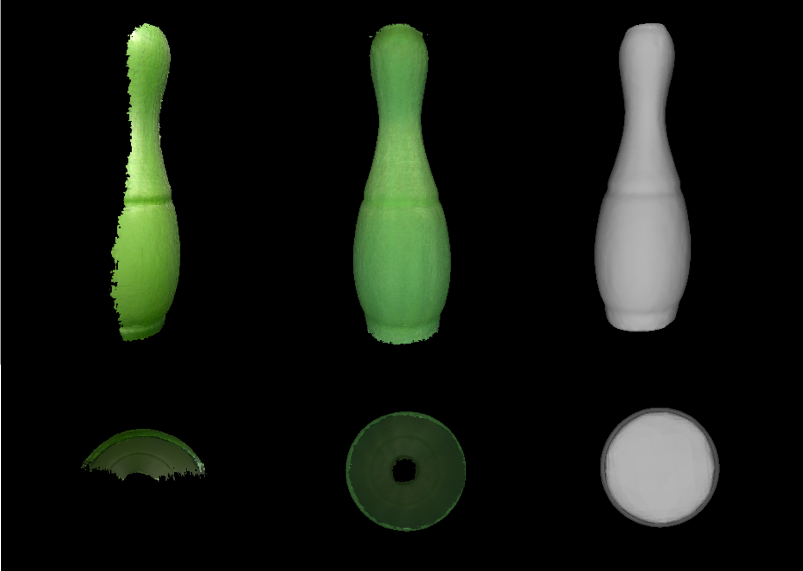
Reconstruction of a symmetric, textureless object. Both the front and the bottom view are provided for better visualization. Left: Existing in-hand scanning approaches fail for such objects. Middle and right: Successful reconstruction by the proposed in-hand scanning system that incorporates 3d hand motion capture.
Source Code and Data
If you have questions concerning the source code or data, please contact Dimitrios Tzionas.
Publications
Tzionas D. and Gall J., 3D Object Reconstruction from Hand-Object Interactions (PDF), International Conference on Computer Vision (ICCV'15), 729 - 737, 2015. ©IEEE